

YHX标准配置文件:YHX控制器
标准配置文件是从高位PLC经由现场网络,使单轴机器人及LCMR200作为定位器动作的LCMR200用工程文件。
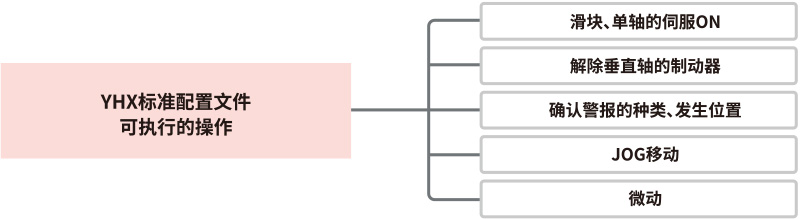
YHX标准配置文件的特点
- 用户无需创建YHX的梯形图
- 使用示教器添加可执行的操作
- 可进行简单的直接值动作和坐标点指定移动
- 可实现指定滑块的个别伺服ON
- 可从高位PLC轻松获取警报信息

01可通过惯用的PLC运行LCMR200
使用YHX标准配置文件,可经由各现场网络的I/O接口,通过PLC等上位装置运行LCMR200。
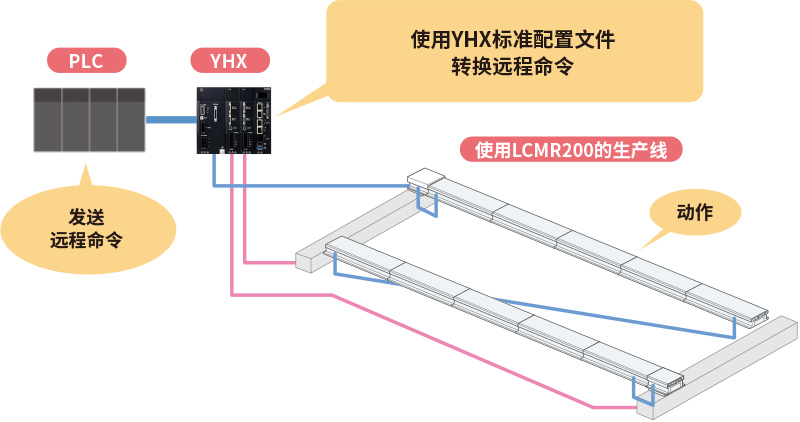
02用户无需创建YHX的梯形图
专用输入输出信号已预分配至现场网络的字区域和位区域,因此无需创建程序,即可执行伺服ON及JOG移动等机器人动作所需的操作。
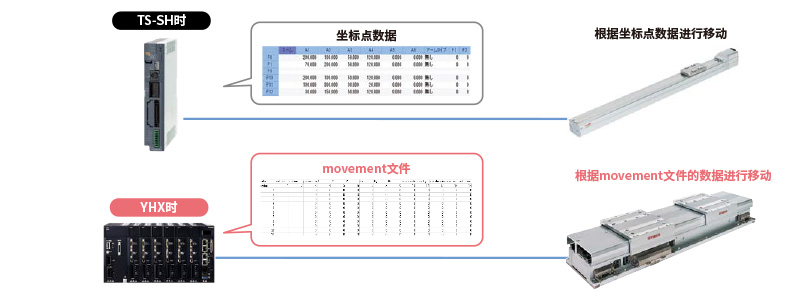
03使用“movement文件”进行控制
使用登录目标位置用的坐标点数据“movement文件”进行控制。
movement文件的作用与坐标点数据类似
04即使未连接PLC,也可通过示教器进行寸动和微动操作
即使在未连接PLC的状态下,也可通过编程平板的寸动和微动操作使轴动作。通过循环布局使用LCMR200时,也可立即执行所需的调整作业。
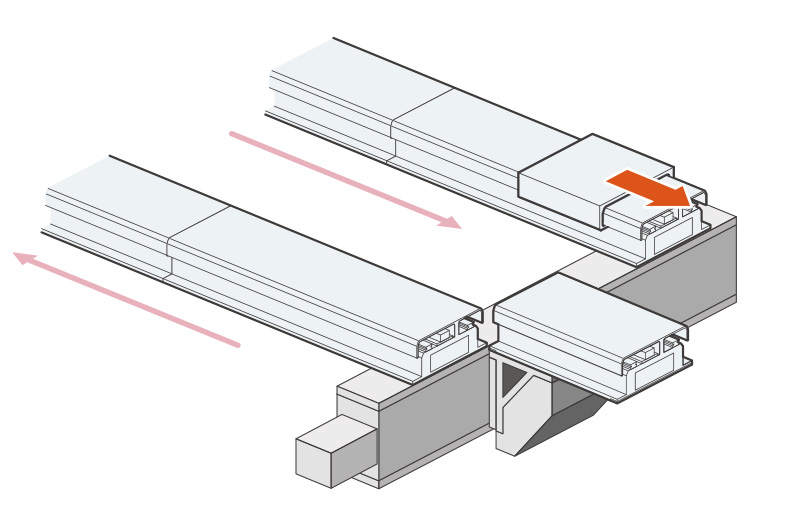
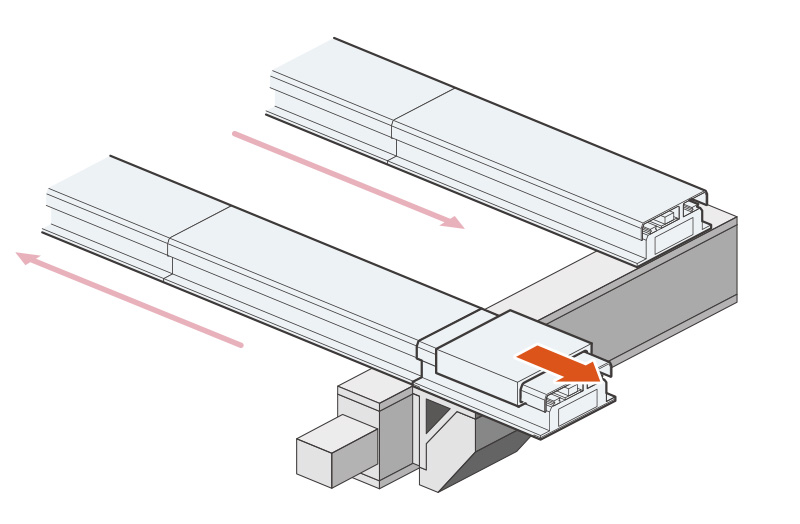
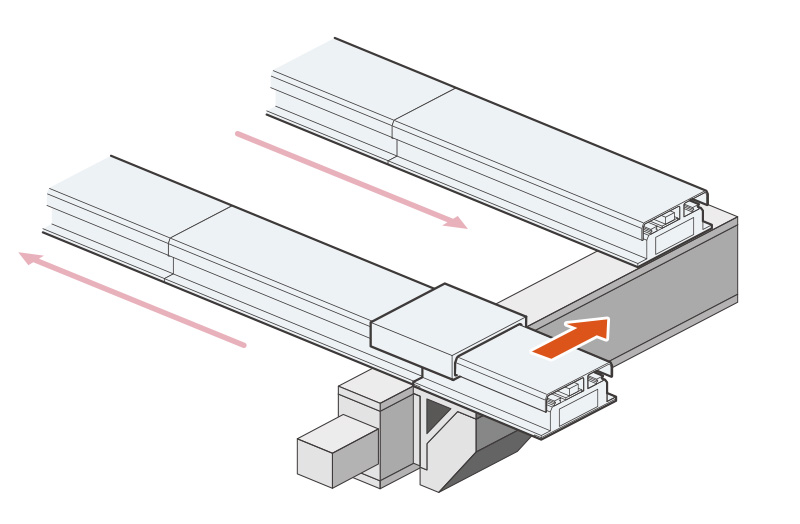
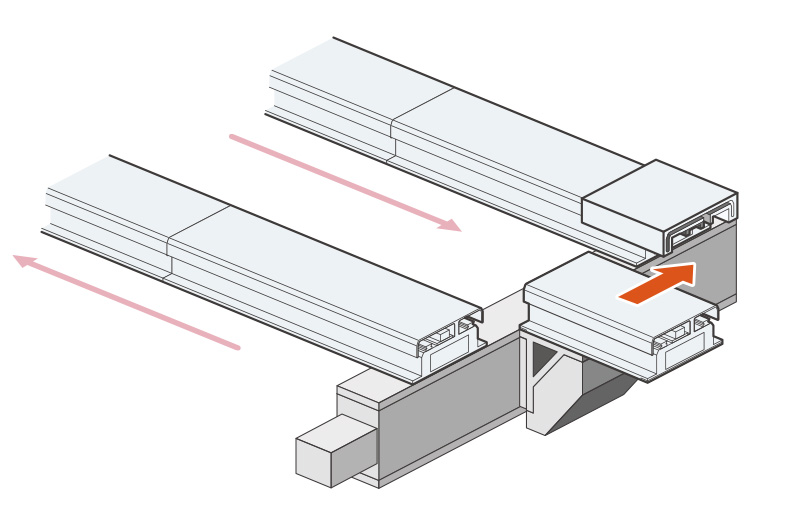
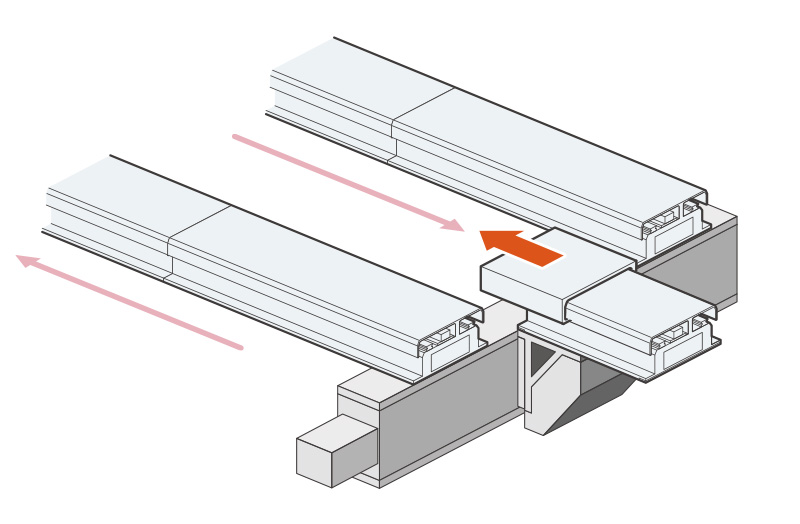
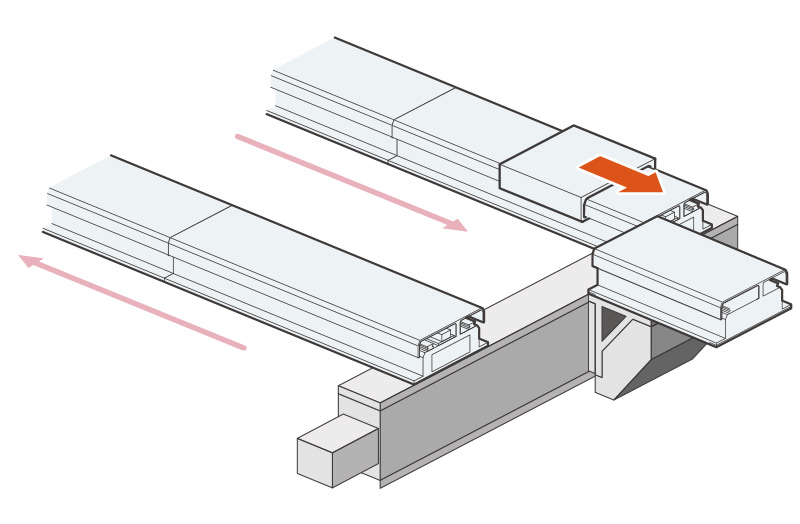
05防止会导致循环部破损的动作
将托盘尺寸登录到参数中,确定滑块可动区域,托盘或工件尺寸大于滑块全长的情况下也将检测出循环异常动作。
由此,可避免循环部发生滑块换搭事故,因此可进行灵活的设计。
06可进行简单的直接值动作和坐标点指定移动
关于坐标点指定
- 合计:最多可指定65,535个坐标点的动作模式
- 指定各坐标点的位置、速度、加减速、公差等
指定示意图
| 坐标点 | 位置(mm) | 速度 | 加速度 | 減速度 | 公差(mm) |
|---|---|---|---|---|---|
| 1 | 100.000 | 1 | 0.5 | 1 | 0.01 |
| 2 | 800.000 | 0.5 | 1 | 1 | 0.05 |
| 3 | 432.562 | 1 | 1 | 1 | 0.02 |
| 4 | 1234.410 | 0.5 | 1 | 1 | 0.01 |
| 5 | 2451.400 | 1 | 1 | 1 | 0.01 |

远程命令概要
| 输入 |
|---|
| 1. 命令 |
| 2. 坐标点指定 |
| 3. 直接值位置指定 |
- 1.
- 伺服ON、原点复归、移动、寸动、微动等
- 2.
- 使用的坐标点编号
- 3.
- 指定直接值时,速度、加速度等只使用 2.的值变更位置
| 输出 |
|---|
| 1. 轴状态 |
| 2. 坐标点输出 |
| 3. 当前位置输出 |
- 1.
- 伺服状态、移动中、移动完成等
- 2.
- 移动中的坐标点编号
- 3.
- 常时输出当前位置
直接值动作
・速度等动作条件由坐标点指定,目标坐标由数值直接指定
欲以PLC管理各滑块位置

欲屡次变更停止位置等情况时有效

坐标点指定动作
・按滑块指定下一个移动的坐标点编号

欲使各滑块在预先确定的停止位置循环等情况时有效

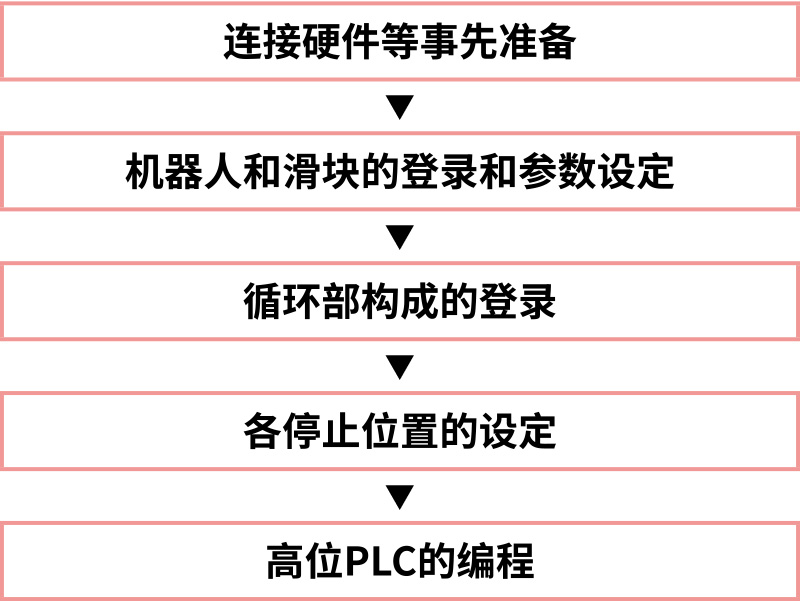
步骤
标准配置文件规格
| 可使用的控制器 | YHX-HCU | |
|---|---|---|
| 运行方法 | 坐标点跟踪(指定坐标点编号进行定位)、直接指定数值(直接指定坐标进行定位) | |
| 对应机器人 | LCMR200、LCM-X、GX系列 (无法混用LCMR200和LCM-X进行控制) |
|
| 接口 | YHX Studio、YHX-PP、现场网络通信 | |
| 动作种类 | 绝对位置移动 | |
| 可登录的最大坐标点数 | 65535 | |
| 控制轴数 (滑块和单轴机器人的总数, 但单轴机器人最多为16轴)制御軸数 |
EtherCAT | 64 |
| EtherNet/IP™ | 64 | |
| PROFINET | 64 | |
| CC-Link | 22 | |
| 主要的输入输出 其他功能请参阅使用说明书。 |
以所有轴为对象的输入 | 伺服ON/OFF切换/联锁/警报重置 |
| 以所有轴为对象的输出 | 伺服状态/联锁状态/警报状态/心跳/紧急停止状态 | |
| 以个别轴为对象的输入 | 伺服ON/OFF切换/原点复归/控制范围内的定位移动(包括LCM的换搭动作)/从控制范围外插入滑块的准备/滑块排出至控制范围外/寸动移动和微动移动/移动停止 | |
| 以个别轴为对象的输出 | 伺服状态/原点复归状态/各种执行状态显示用专用输出 指定坐标点编号/当前位置/轴警报状态 | |
| 主要远程命令 其他远程命令请参阅使用说明书。 |
设定数据的写入、读取 | |
| 警报确认 | ||
| 累计里程、换搭次数的写入和读取 | ||



YHX标准配置文件:YHX控制器
相关内容


