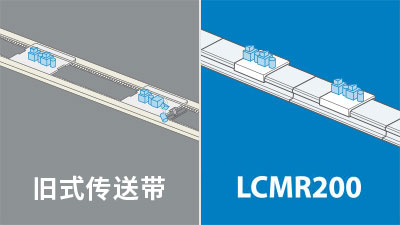
线性传送模组 LCMR200
升级版线性传送的提案 新一代工厂搬运平台

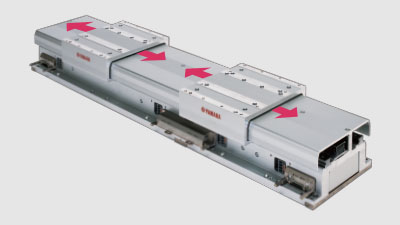
线性传送模组 LCMR200
实现分秒必争的生产工序
- 停止精度:
±5μm - 最高速度※:
2,500mm/sec
※搬运重量为10kg以上时,将根据重量降低至1,000mm/sec。 - 滑块间的间距:
210mm
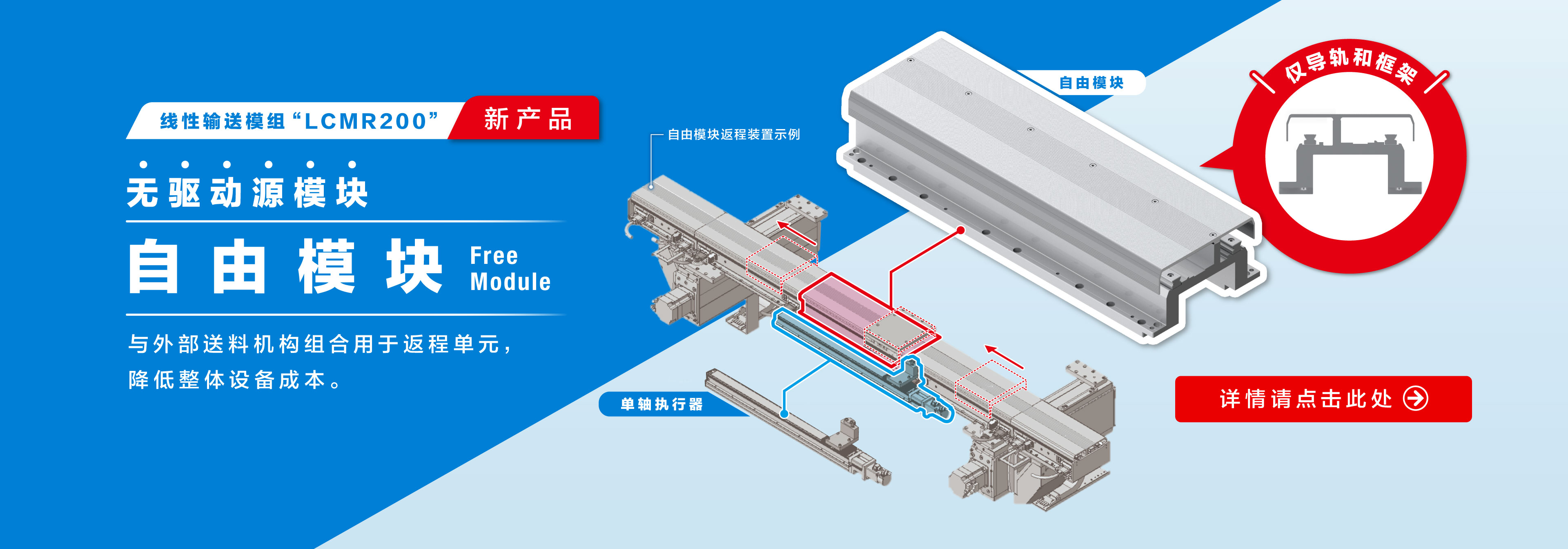
助力降低成本的新产品:自由模块新面市!
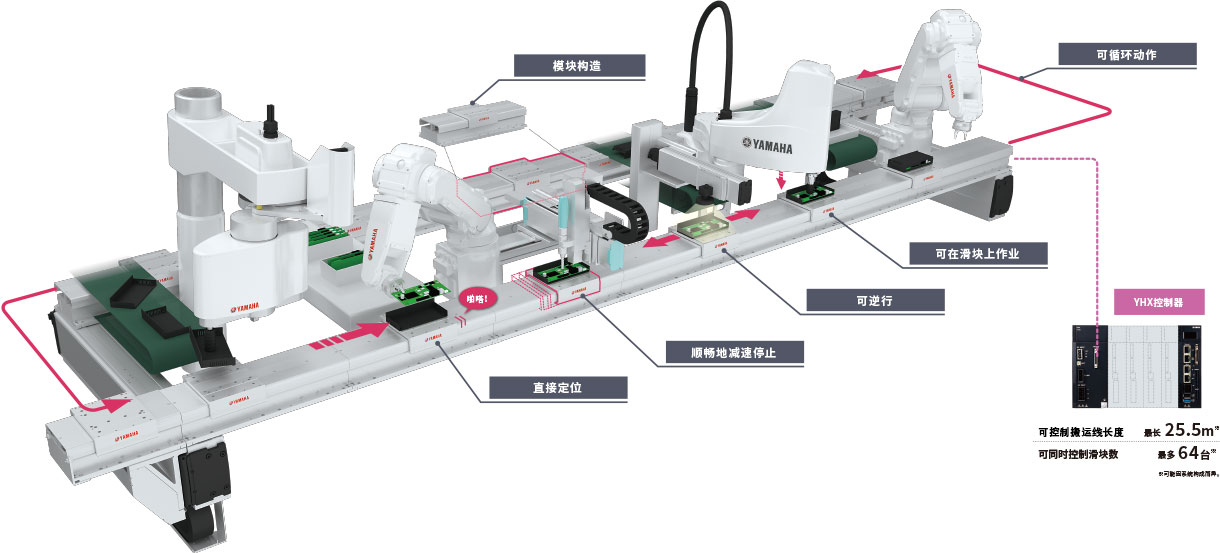
新一代工厂搬运平台
单纯搬运工件的时间为无价值时间。
雅马哈线性传送模块LCMR200的搬运部分也 实现了机器人化。


苏州工业园区苏虹东路
17号8号厂房
电话:0512-68317091
0512-68317092
雅马哈工业机器人
全球服务网点


升级版线性传送的提案 新一代工厂搬运平台
实现分秒必争的生产工序
助力降低成本的新产品:自由模块新面市!
单纯搬运工件的时间为无价值时间。
雅马哈线性传送模块LCMR200的搬运部分也 实现了机器人化。